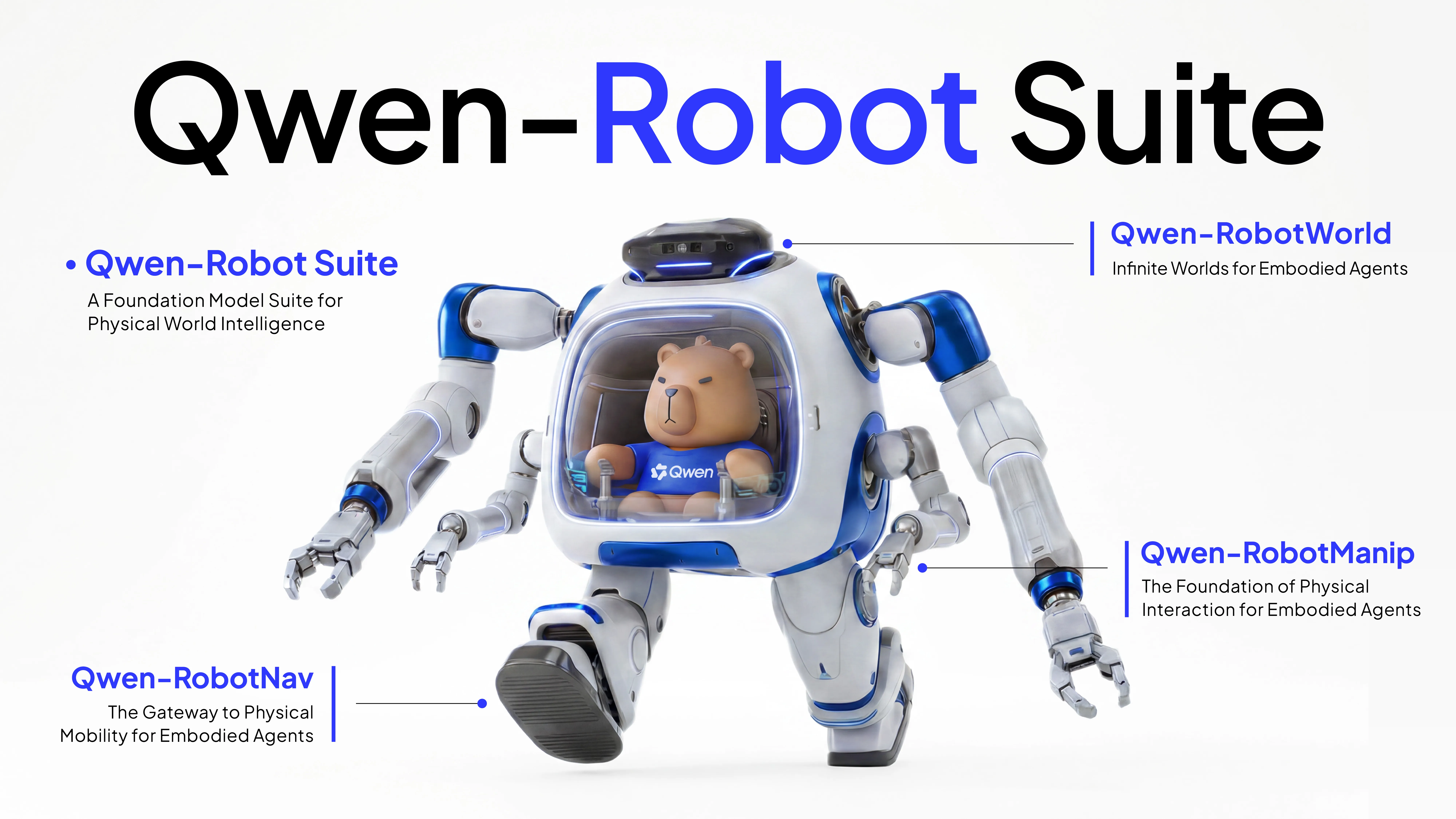
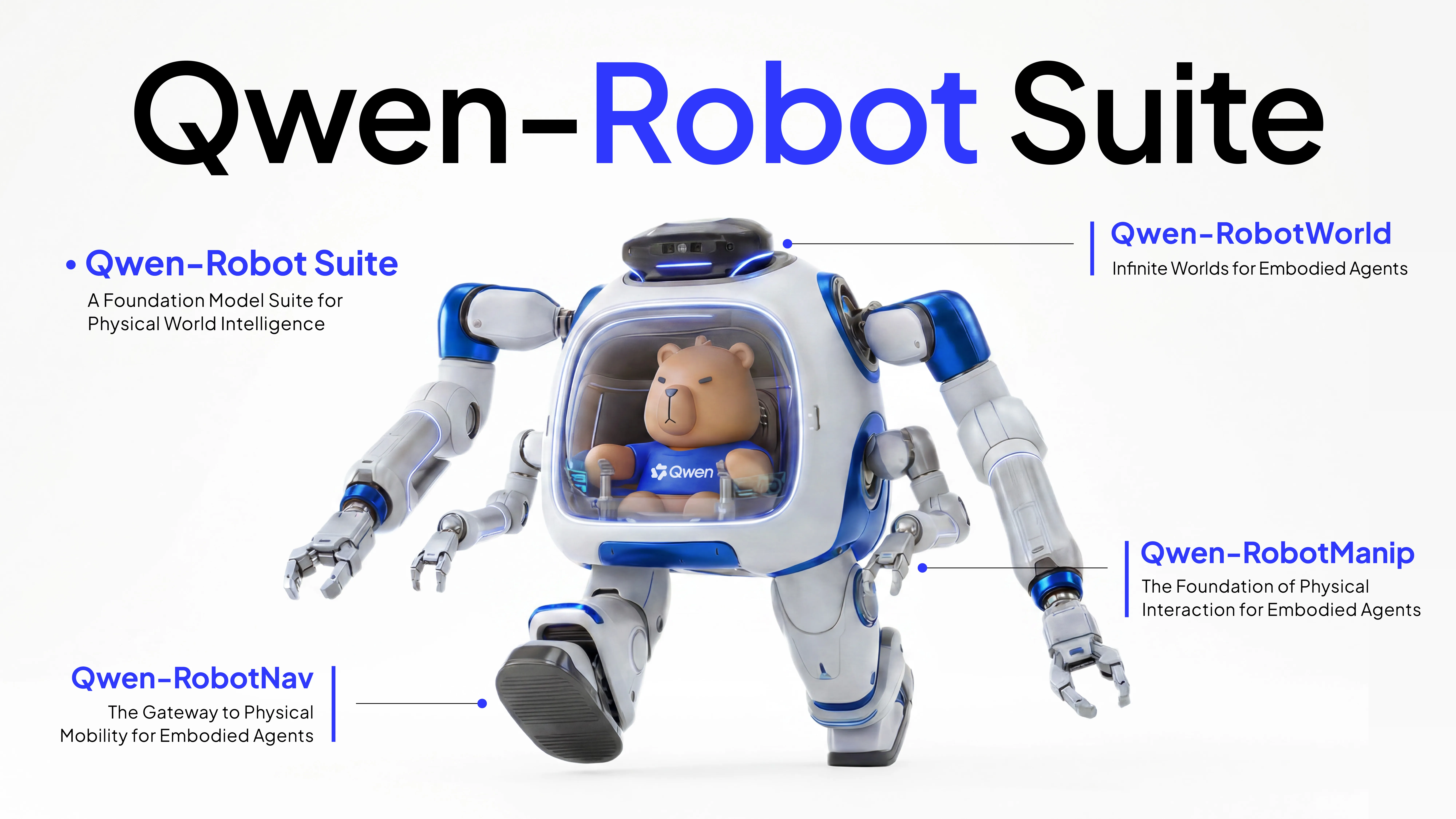
On June 16, Alibaba‘s Qwen team released its first complete embodied AI model family. The Qwen-Robot suite isn’t one model. It‘s three, each designed to solve a different piece of the physical intelligence puzzle.
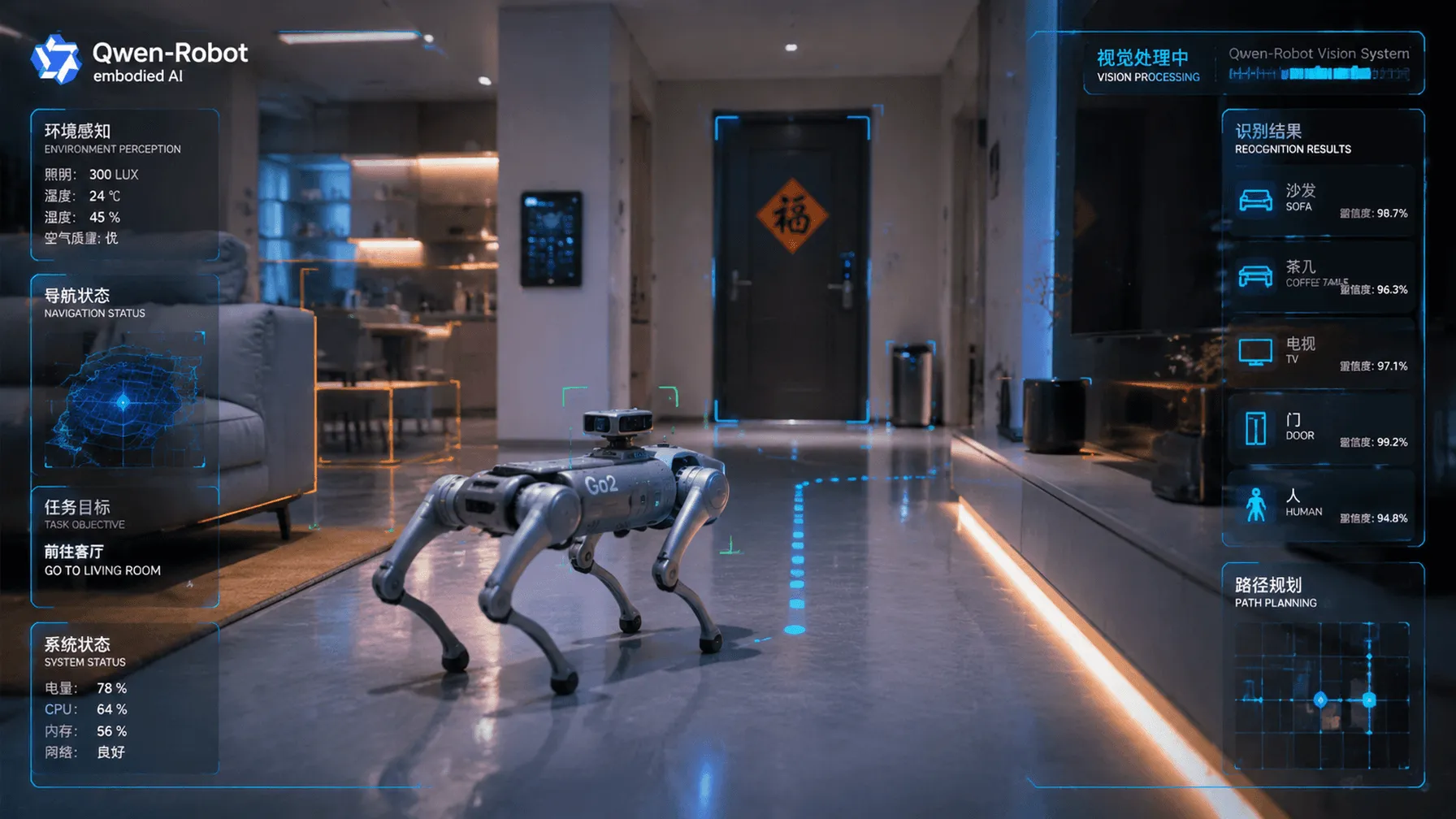
Qwen-RobotNav handles movement. It unifies five navigation tasks into a single model: instruction following, object search, target tracking, autonomous driving, and embodied question answering. In one demo, a Unitree Go2 quadruped robot navigated an unfamiliar apartment step by step, following verbal instructions to traverse multiple rooms without any prior mapping. Inference latency: just 196 milliseconds.
Qwen-RobotManip handles manipulation. It trains on over 38,000 hours of operational data. And here‘s the detail that matters: every single hour came from open-source data. No proprietary collections. No secret sauce.
Qwen-RobotWorld handles prediction. It’s a world model that can predict physics-compliant futures across manipulation, driving, and navigation scenarios. In other words, the robot can“imagine” what happens next before it moves. The three models can be deployed independently or orchestrated together through Qwen-RobotClaw, an internal agent framework that treats them as physical-world tools.
The Open-Source Detail That Changes Everything
Here‘s what makes this release genuinely interesting. Qwen-RobotManip trained on more than 38,000 hours of data, but none of it was private. The industry assumption has been that proprietary robot data is the moat — whoever has more factory floor footage wins. Qwen just proved that assumption wrong.
In the RoboChallenge Table30 v1 benchmark, two Qwen-RobotManip versions took first and second place in the general track, outperforming the third-place entry by 20 percentage points. In cross-robot generalization, the model outperformed previous state-of-the-art by a factor of three on zero-shot cross-embodiment transfer.
Unified representation is the key. The model uses an 80-dimensional state-action space that works across single-arm, dual-arm, and dexterous hand configurations. It also uses camera-relative end-effector positioning instead of absolute coordinates. This makes visually similar motions numerically similar even when the underlying hardware is completely different. The result is a model that can jump between robot platforms without retraining. This suggests that data barriers in embodied AI may be lower than the industry assumed. Better model architecture, not more proprietary data, could be the real differentiator.
The World Model as Pre-Game Rehearsal
The third piece is arguably the most interesting. Qwen-RobotWorld is a language-conditioned video world model that predicts what will happen next in the physical world. It translates natural language into action and then simulates the outcome.
What does this look like in practice? Before a robot picks up a glass, it can run a mental simulation of the motion and check for potential failures. It‘s not blind trial-and-error. It’s“think before you act” — but at the level of physics, not just language.
The model is trained on 8.6 million video-text pairs and covers more than 20 robot configurations and 500 action categories. It ranked first across four major world model benchmarks, demonstrating strong physical compliance and motion fidelity.
What This Means for Embodied AI
Three signals stand out. First, the open-source moment is arriving. In 2024, open-source language models caught up to their closed-source counterparts. In June 2026, embodied AI may be crossing the same threshold. Qwen-Robot trained on public data and outperformed proprietary models on real-world benchmarks. That changes the competitive math for everyone building physical AI.
Second, hardware diversity may not be the barrier it appears to be. The industry assumption has been that every robot is unique, so every model must be custom-trained. Qwen-Robot just showed that a single representation can work across multiple robot types with minimal adaptation.
Third, world models are becoming the new frontier. If language models are about“knowing” and action models are about“doing,” world models are about“imagining before doing.” Qwen-RobotWorld is part of a broader shift where robots simulate outcomes before committing to action. That’s how you move from“demo”to“deployment.”
The Gap That Remains
Qwen-Robot is not general intelligence. The models are specialized for specific tasks. The world model is still limited to short-horizon predictions. The 80-dimensional action space, while impressive, doesn‘t cover every possible robot configuration. And the robotic hardware itself is still the bottleneck. A smart brain on clumsy legs is still clumsy. Qwen-Robot demonstrates the software progress, but physical hardware remains a separate challenge. The suite is currently in pilot testing with enterprise customers. Broad commercial availability is still ahead.
What This Actually Means
Alibaba just released one of the most complete open embodied AI stacks to date. It covers navigation, manipulation, and world modeling. It deployed on real hardware with a single camera and no prior mapping. It did all of this using open-source data, not proprietary collections.
The industry has assumed that embodied AI would be won by whoever could collect the most factory floor data. Qwen just proved that better architecture might matter more than better data. That’s the real story — not that the models work, but that they work without the secret sauce everyone thought was required.
P.S. The most telling detail in the Qwen-Robot release isn‘t the benchmark scores or the world model or the 38,000 hours of training data. It’s that the team released Chat2Robot, a browser-based platform where anyone can chat with a robot and watch it respond in real time. That‘s not a product launch. That’s a statement of confidence. If you‘re going to open your robot to the internet, you’d better be sure it won‘t do something embarrassing on camera.